世界初!※「画像データのみによる自己位置推定」を実装したAUVにおいて、[水中充電ステーションから離脱 / 航行 /ドッキング / 水中充電 /無線通信] に成功!
- サービス・技術
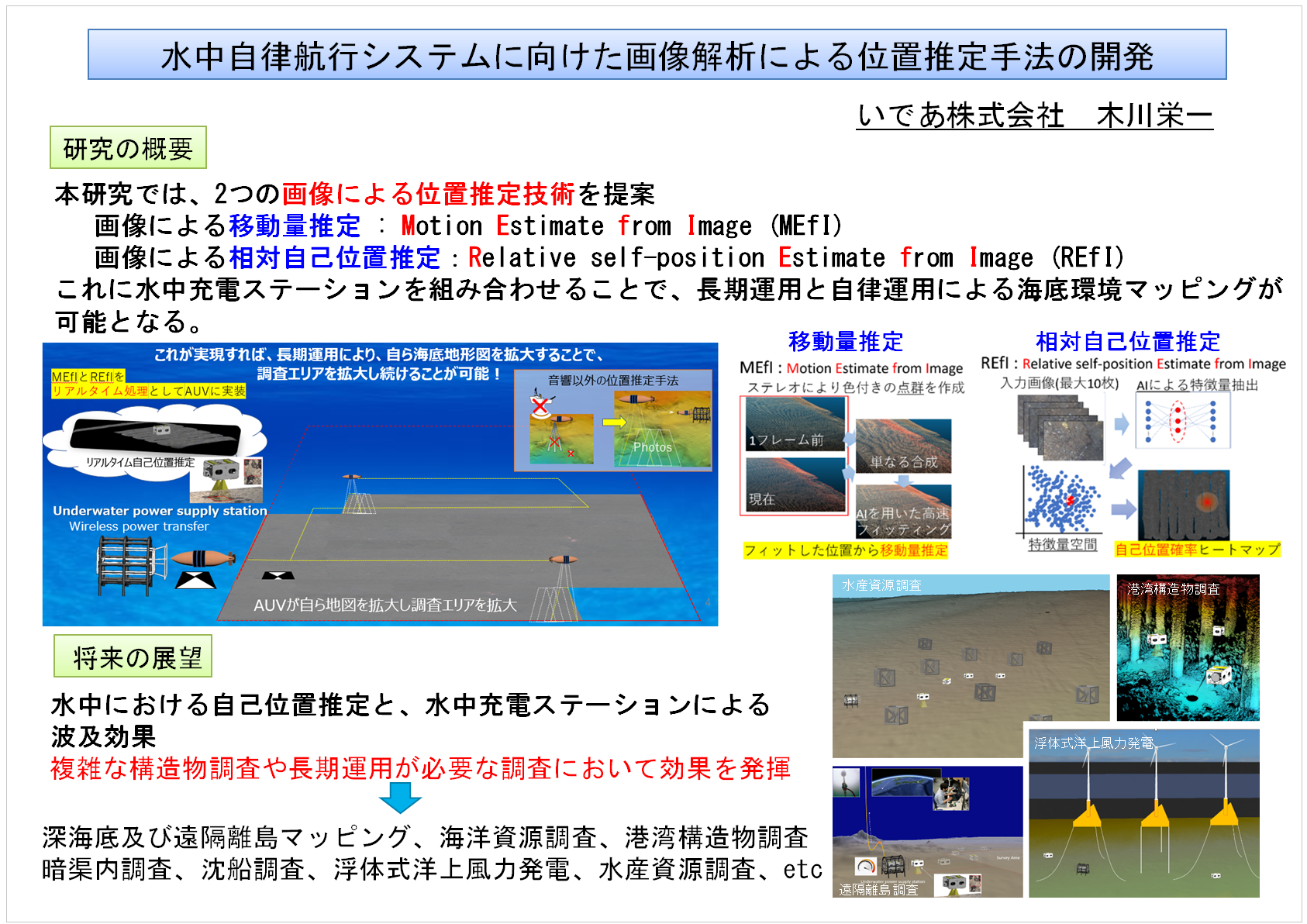
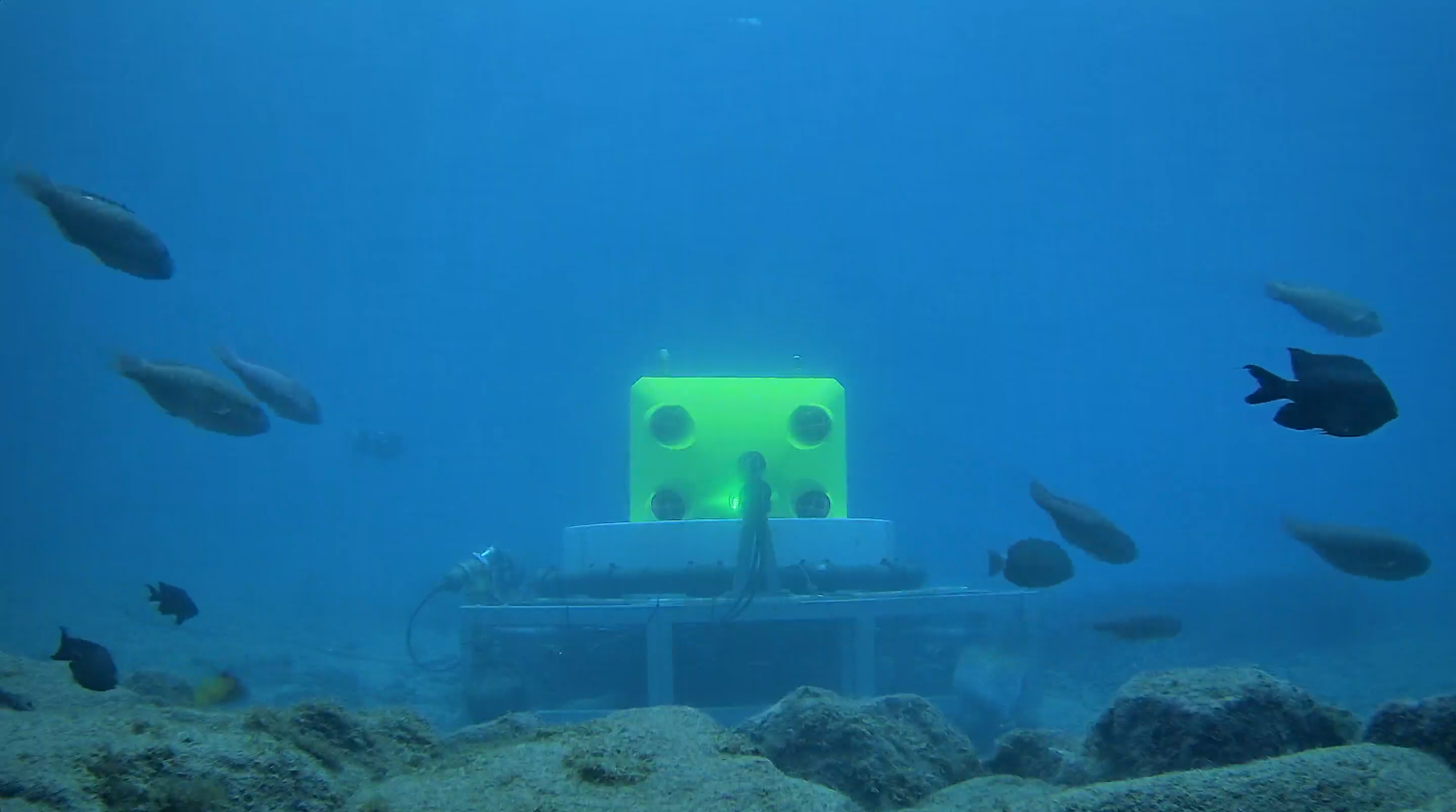
画像データのみによる自己位置推定技術により、自律型無人探査機(AUV:Autonomous Underwater Vehicle)を制御し、海底に設置した水中充電ステーションから離脱し周囲を航行した後、再び水中充電ステーションにドッキングを行い、水中充電と無線によるデータ通信を行う一連のシーケンスを、実海域において世界で初めて成功しました。
本研究開発は、防衛装備庁の令和4年度 安全保障技術研究推進制度に採択された「水中自律航行システムに向けた画像解析による位置推定手法の開発(代表実施者:いであ株式会社、共同実施者:株式会社ディープリッジテク、協力機関:株式会社パナソニックシステムネットワークス開発研究所)」において実施したものです(図1参照)。
防衛装備庁 安全保障技術研究推進制度(ウェブサイト)
https://www.mod.go.jp/atla/funding/kadai/r04kadai_2.pdf
広範囲調査を前提とした画像のみによる自己位置推定技術、および長期間観測を前提とした、水中充電ステーションとの連携は世界最先端の革新的技術です。
従来、電波の減衰による影響を受ける水中において、自律的に航行するAUVは、自分がいまどこにいるのか、という最も重要な[自己位置推定]をするために「音」を用いる必要があり、この「音」に関する技術が発展してきました。たとえば、海底に向けて音波を発することでAUVの速度を計測し時間積分により位置を推定する方法や、GPSを取得できる母船から音で位置を計測する方法などがあります。
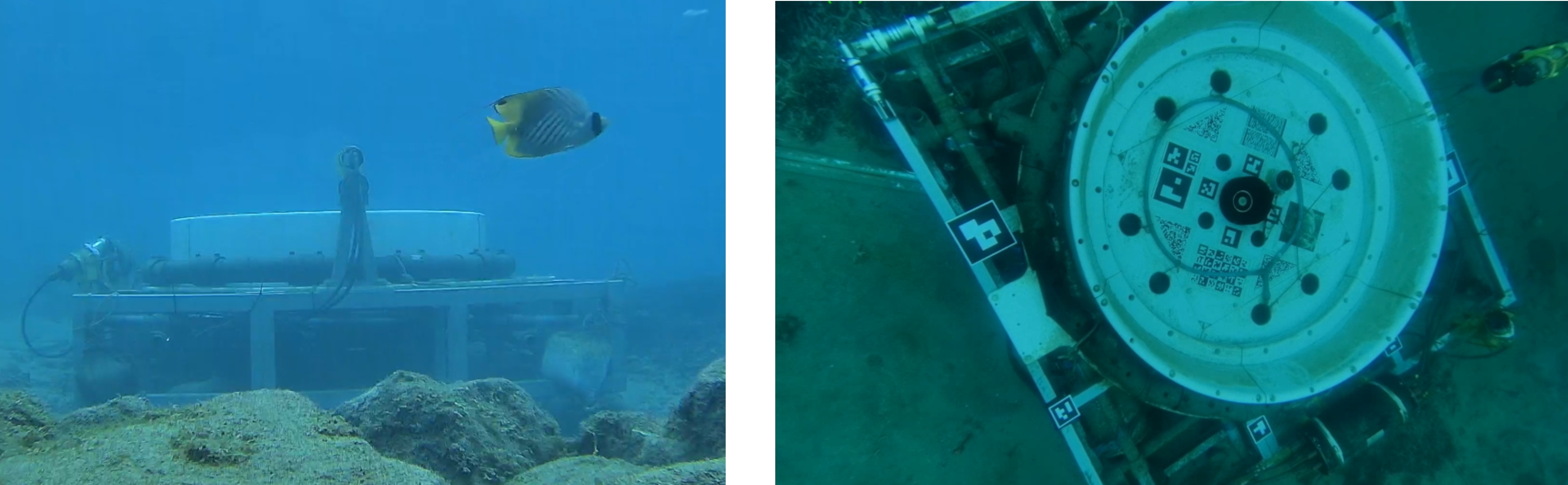
しかし、我々はよりロバストな自己位置推定を目指し、「音」以外のセンサデータ、すなわちAUVがリアルタイムで撮影した海底等の画像データのみを使って、どこまで位置推定ができるかを検討し、その手法を考案しました。また、その手法が有効であることを示すために、音による位置推定装置を持たないAUVを設計 / 開発し、その航行の出発点となる海底設置型の「水中充電ステーション」を設計 / 製造しました。さらに、この水中充電ステーションに光通信を搭載し、長期観測を前提とした、支援船レスな調査の一連のシーケンスを実海域において確認しました。
AUVの底面に取り付けられたカメラシステムからの画像データを新たに開発したソフトウェアを使ってリアルタイムで処理し、自己位置を推定します。
従来の母船を用いた調査における一連のシーケンスは、一般的に以下の内容を行います。
1.母船からAUV投入
2.航行(調査)[音による自己位置推定]
3.母船への揚収
4.船上でのデータ回収 / 充電
しかし、水中充電ステーションを用いて充電や通信を行い、母船との音響測位が不要になると、以下のような内容が一連のシーケンスとなります。
1.水中充電ステーションとのドッキング状態(水中充電ステーションと通信)
2.水中充電ステーションからの離脱
3.航行(調査)[画像のみによる自己位置推定]
4.水中充電ステーションへのドッキング
5.AUVと水中充電ステーション間の通信およびAUVの充電
この一連のシーケンスにおいては、音響を使った自己位置推定を行わず、画像のみによる自己位置推定だけを行います。また、AUVは水中充電ステーションにおいて、充電やデータの回収、陸上施設との通信を行います。
この一連のシーケンスを2026年2月に鹿児島県十島村口之島の漁港において確認しました。これらの成功により、AUVを水中から空気中へ揚収することなく、音を必要としない、画像のみによる自己位置推定を用いても、長期間の調査を行えることが可能であることが示されました。

なお、本技術([画像のみによる自己位置推定])については、現在特許出願中です。
発明の名称:自己位置推定装置、無人移動体、プログラム及び無人移動体の自己位置推定方法
出願番号:特願2026-033043
出願日:2026年3月3日
2023年4月に閣議決定された第4期海洋基本計画において、AUV戦略等の技術開発から社会実装に至るまでの戦略的なビジョンを策定し、その着実な実行を図ることが掲げられています。
総合海洋政策本部による「自律型無人探査機(AUV)の社会実装に向けた戦略」においては、洋上風力発電をはじめとする海洋産業の拡大や海洋安全保障の取組の強化が進展する中、少子高齢化による人口減少や産業構造の転換等を見据え、広大な海洋の開発・利用における省人化や生産性向上を進めるとともに、人的リスクの回避に取り組む必要があり、このため、人による遠隔操縦を必要とせず、自ら状況を判断して全自動で水中を航行するロボットであるAUVを、洋上風力発電をはじめとする海洋インフラの設置・保守管理、海洋資源開発、海洋観測・調査、海洋安全保障、海洋環境保全、防災・減災等、海洋に係る各種活動に導入することが重要と、記載されています。また、2030年までに我が国のAUV産業が育成され、海外展開まで可能となるよう国主導で取り組む方針も打ち出されています。
本プロジェクトで開発した技術は、上記戦略が掲げる水中・海洋における各種活動においてAUVを導入して利活用するための重要技術になると考えられます。更にこの技術と合わせてAUV開発を加速させ、AUV産業の発展と活用に貢献したいと考えております。